行業新聞
蝸輪蝸桿設計原理
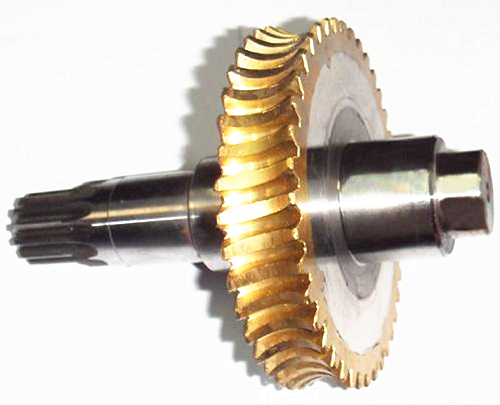
基本參數 模數m、壓力角、蝸桿直徑系數q、導程角、蝸桿頭數 、蝸輪齒數、齒頂高系數(取1)及頂隙系數(取0.2)。其中,模數m和壓力角是指蝸桿軸面的模數和壓力角,亦即蝸輪端面的模數和壓力角,且均為標準值;蝸桿直徑系數q為蝸桿分度圓直徑與其模數m的比值。中間平面內蝸桿與蝸輪的模數和壓力角分別相等,即蝸輪的端面模數等于蝸桿的軸面模數且為標準值;蝸輪的端面壓力角應等于蝸桿的軸面壓力角且為標準值,即 ==m ,== 2.當蝸輪蝸桿的交錯角為時,還需保證,而且蝸輪與蝸桿螺旋 蝸輪蝸桿線旋向必須相同。 四、幾何尺寸計算與圓柱齒輪基本相同,需注意的幾個問題 1.蝸桿導程角()是蝸桿分度圓柱上螺旋線的切線與蝸桿端面之間的夾角,與螺桿螺旋角的關系為,蝸輪的螺旋角,大則傳動效率高,當小于嚙合齒間當量摩擦角時,機構自鎖。 2.引入蝸桿直徑系數q是為了限制蝸輪滾刀的數目,使蝸桿分度圓直徑進行了標準化m一定時,q大則大,蝸桿軸的剛度及強度相應增大;一定時,q小則導程角增大,傳動效率相應提高。 3.蝸桿頭數推薦值為1、2、4、6,當取小值時,其傳動比大,且具有自鎖性;當取大值時,傳動效率高。 與圓柱齒輪傳動不同,蝸桿蝸輪機構傳動比不等于,而是,蝸桿蝸輪機構的中心距不等于,而是。 4.蝸桿蝸輪傳動中蝸輪轉向的判定方法,可根據嚙合點K處方向、方向(平行于螺旋線的切線)及應垂直于蝸輪軸線畫速度矢量三角形來判定;也可用“右旋蝸桿左手握,左旋蝸桿右手握,四指拇指”來判定。
基本參數 模數m、壓力角、蝸桿直徑系數q、導程角、蝸桿頭數 、蝸輪齒數、齒頂高系數(取1)及頂隙系數(取0.2)。其中,模數m和壓力角是指蝸桿軸面的模數和壓力角,亦即蝸輪端面的模數和壓力角,且均為標準值;蝸桿直徑系數q為蝸桿分度圓直徑與其模數m的比值。中間平面內蝸桿與蝸輪的模數和壓力角分別相等,即蝸輪的端面模數等于蝸桿的軸面模數且為標準值;蝸輪的端面壓力角應等于蝸桿的軸面壓力角且為標準值,即 ==m ,== 2.當蝸輪蝸桿的交錯角為時,還需保證,而且蝸輪與蝸桿螺旋 蝸輪蝸桿線旋向必須相同。 四、幾何尺寸計算與圓柱齒輪基本相同,需注意的幾個問題 1.蝸桿導程角()是蝸桿分度圓柱上螺旋線的切線與蝸桿端面之間的夾角,與螺桿螺旋角的關系為,蝸輪的螺旋角,大則傳動效率高,當小于嚙合齒間當量摩擦角時,機構自鎖。 2.引入蝸桿直徑系數q是為了限制蝸輪滾刀的數目,使蝸桿分度圓直徑進行了標準化m一定時,q大則大,蝸桿軸的剛度及強度相應增大;一定時,q小則導程角增大,傳動效率相應提高。 3.蝸桿頭數推薦值為1、2、4、6,當取小值時,其傳動比大,且具有自鎖性;當取大值時,傳動效率高。 與圓柱齒輪傳動不同,蝸桿蝸輪機構傳動比不等于,而是,蝸桿蝸輪機構的中心距不等于,而是。 4.蝸桿蝸輪傳動中蝸輪轉向的判定方法,可根據嚙合點K處方向、方向(平行于螺旋線的切線)及應垂直于蝸輪軸線畫速度矢量三角形來判定;也可用“右旋蝸桿左手握,左旋蝸桿右手握,四指拇指”來判定。
下一篇:
蝸桿傳動的使用條件 上一篇:
蝸輪蝸桿減速機常見原因及解決方法